

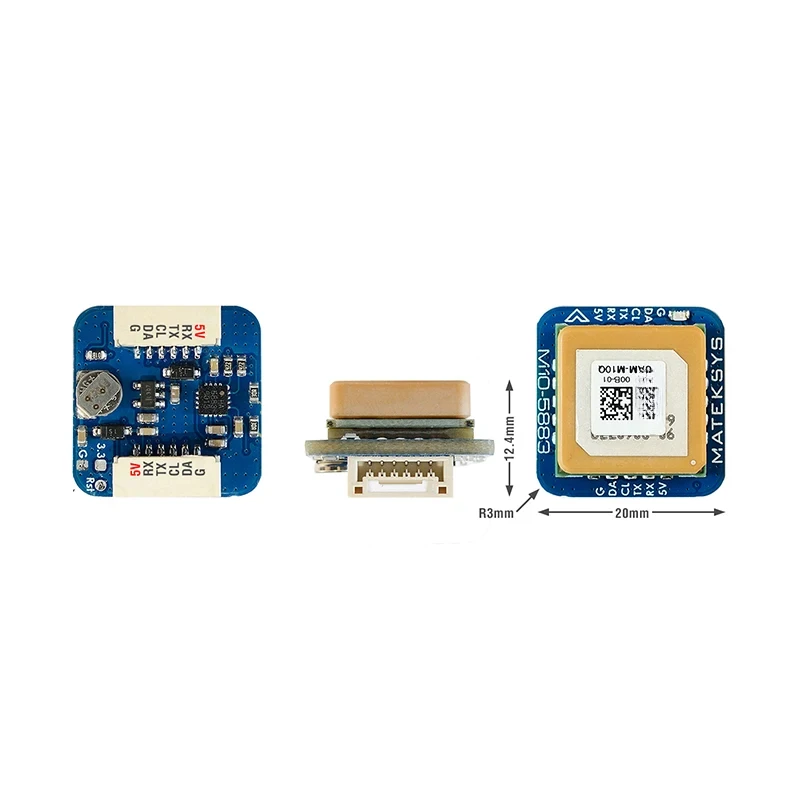
MATEK M10Q-5883
1 820 ₴
- Немає в наявності
- Код: 95

MATEK M10Q-5883Немає в наявності
1 820 ₴
+380 (93) 379-61-28
Характеристики:
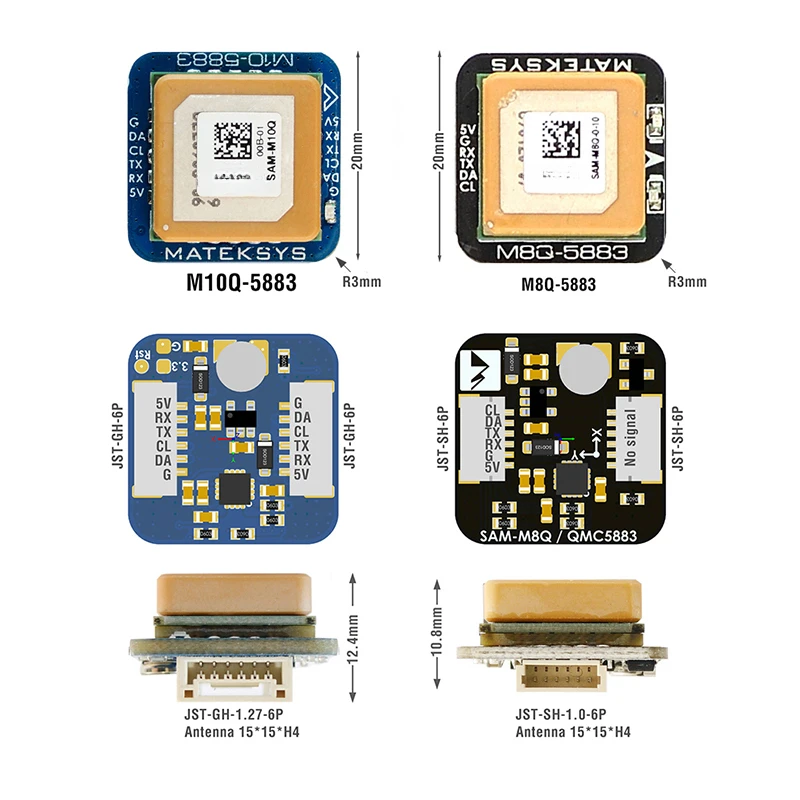
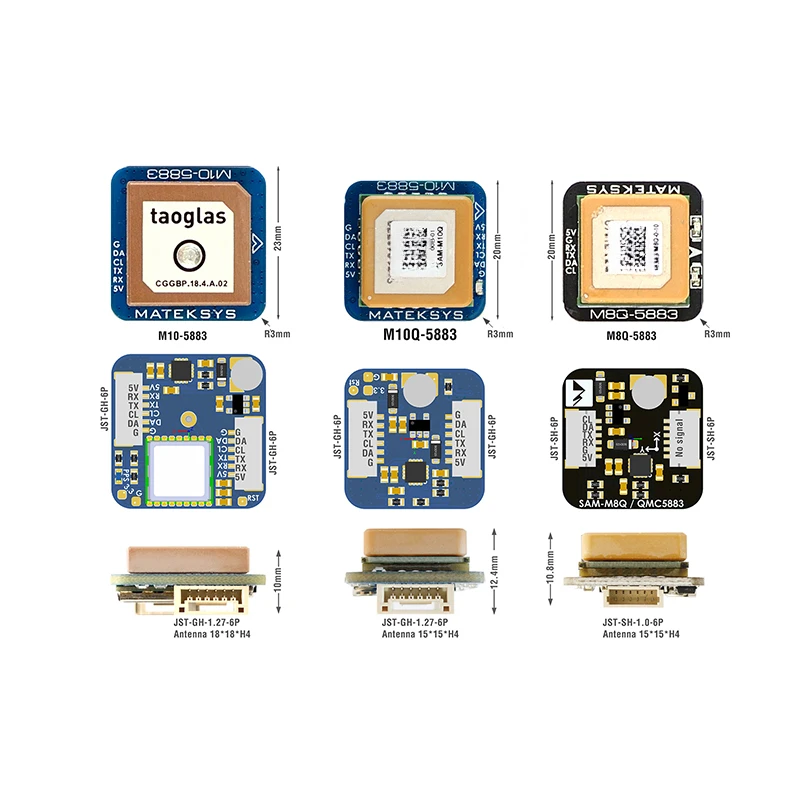
- GNSS: u-blox M10 (GPS, GLONASS, Galileo, BeiDou)
- Магнітний компас: QMC5883L
- Антена: Патч антена 15x15x4 мм
- Діапазон вхідної напруги: 4~9 В (5В на контакті/pin)
- Споживання енергії: 13 мА
- Швидкість UART: 9600 за замовчуванням
- Робоча температура: -20 ~ 80 °C
- Інтерфейси: UART (TX, RX) для GNSS, I2C (DA, CL) для Compass QMC5883L
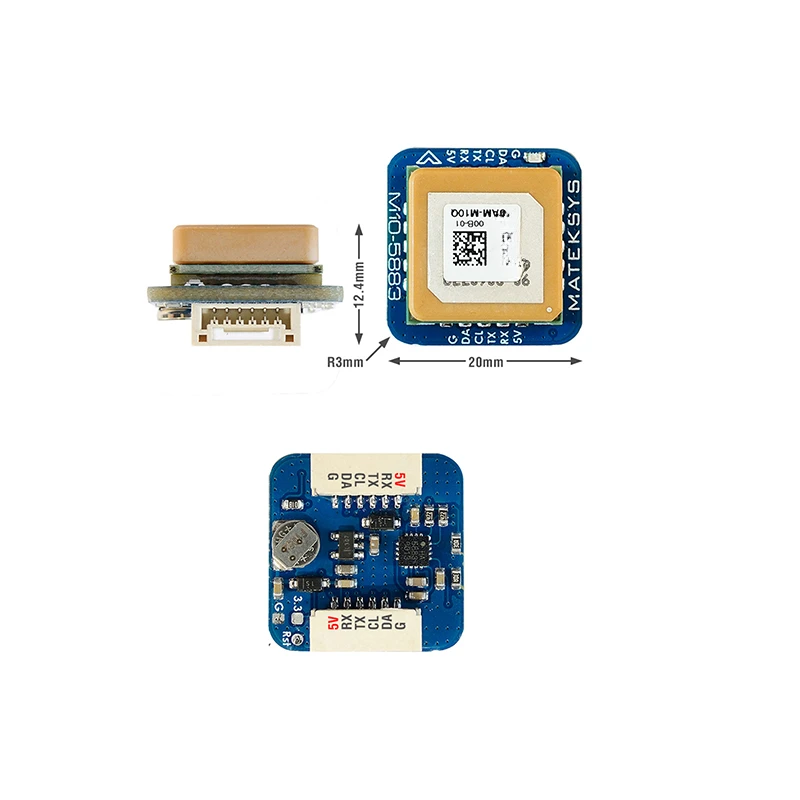
- Роз'єм: JST-GH-6P (SM06B-GHS-TB), крок 1.27 мм
- Індикатор GNSS PPS: Зелений (постійне світло після увімкнення, блимає 1 Гц при 3D-фіксації GNSS)
- Протокол: UBX (u-blox) 5 Гц @ GPS + GAL + BDS B1C + GLO або NMEA 1 Гц
- Розміри: 20x20x12.4 мм
- Вага: 8 г
Комплектація:
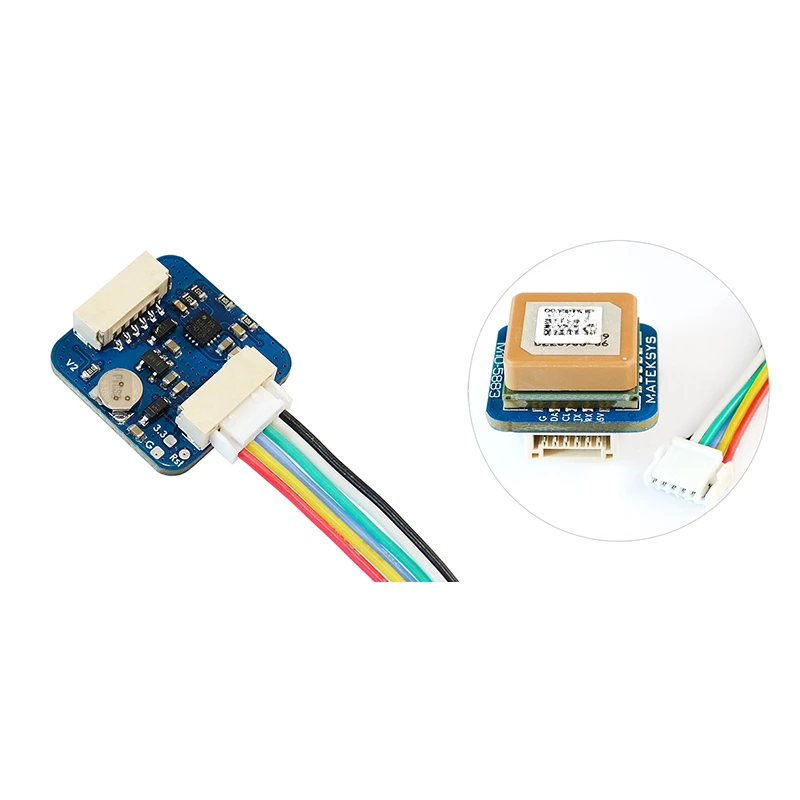
- 1x M10Q-5883
- 1x Силіконовий кабель JST-GH-6P до JST-GH-6P, 20 см
Підключення:
- M10Q-5883 5V → Flight Controller 4~9V
- M10Q-5883 RX → Flight Controller UART_TX
- M10Q-5883 TX → Flight Controller UART_RX
- M10Q-5883 CL → Flight Controller I2C_SCL
- M10Q-5883 DA → Flight Controller I2C_SDA
- M10Q-5883 G → Flight Controller GND
Примітки:
- Компас повинен бути розташований рівно, нахил не рекомендовано.
- Для INAV/BetaFlight: Стрілка компаса вперед → CW 270° Flip, стрілка компаса назад → CW 90° Flip.
- Для Ardupilot/Mission Planner: Вибрати обертання "None".
- Розташовуйте компас не менше 10 см від джерел живлення, ESC, моторів або металевих об'єктів.
- Необхідні версії прошивки: INAV 5.0.0, Betaflight 4.3.0, ArduPilot 4.3 або новіші.
- Поради з налаштування та усунення несправностей: Для скидання модулю закоротіть контакт "RST" до землі на 100 мс (холодний старт). Якщо GPS не визначається (сірий значок), перевірте підключення та зробіть скидання.

Характеристики
| Основні атрибути | |
|---|---|
| Виробник | Matek |
| Країна виробник | Китай |
| Тип | Модулі GPS і компаси |
Інформація для замовлення
- Ціна: 1 820 ₴